Introduction¶
Balder is a graphical user application that provides decision support for the captain in purse seining before gear deployment.
Balder makes use of real-time data and model predictive control algorithms to predict a deployment trajectory for the purse seine. The deployment trajectory is devised by taking into account expected sink depth/speed of the gear and use a prescribed trajectory of the fish school. Environment conditions such as sea currents are also taken into consideration. Figure 1 shows a context diagram for Balder.

Figure 1 System context for Balder.¶
Component overview¶
There are several visual components that display key information to the user, see overview in Figure 2.
The application is written with Qt modeling language (QML) and the main entrypoint is balder.
Each component are written using QML classes to declaratively describe the graphical user interface.
The main QML classes are indicated within square brackets under each component in Figure 2.
Details for these classes can be found in API Reference and within links to the corresponding .qml files.

Figure 2 Component diagram for Balder.¶
Screendumps of application¶
Below we provide screendumps of three central panel views listed in Figure 2:
Figure 3 shows the purse planner dashboard,
Figure 4 shows the user configuration,
Figure 5 show the control and status pane for algorithm.
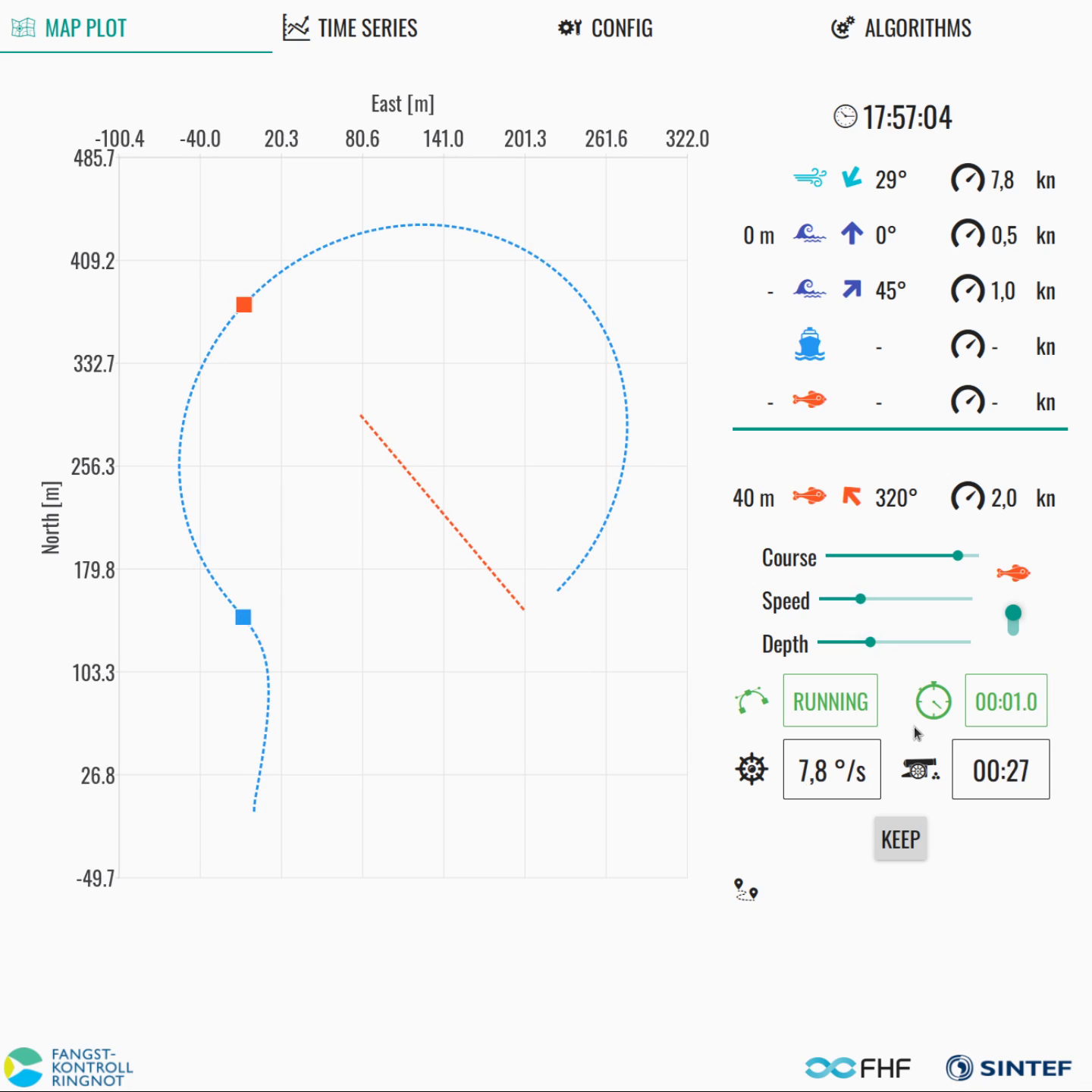
Figure 3 Screenshot of main view.¶
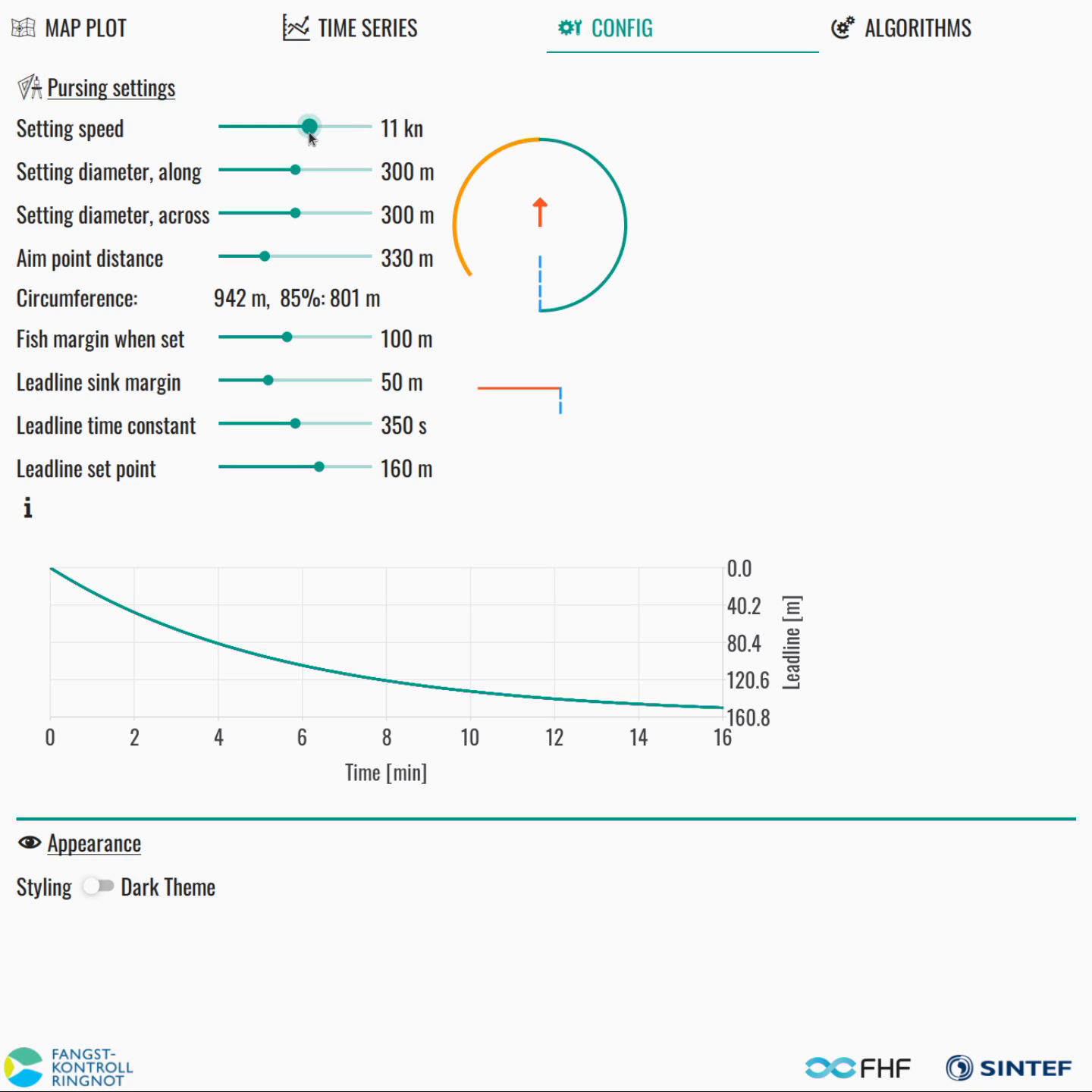
Figure 4 Screenshot of configuration view.¶
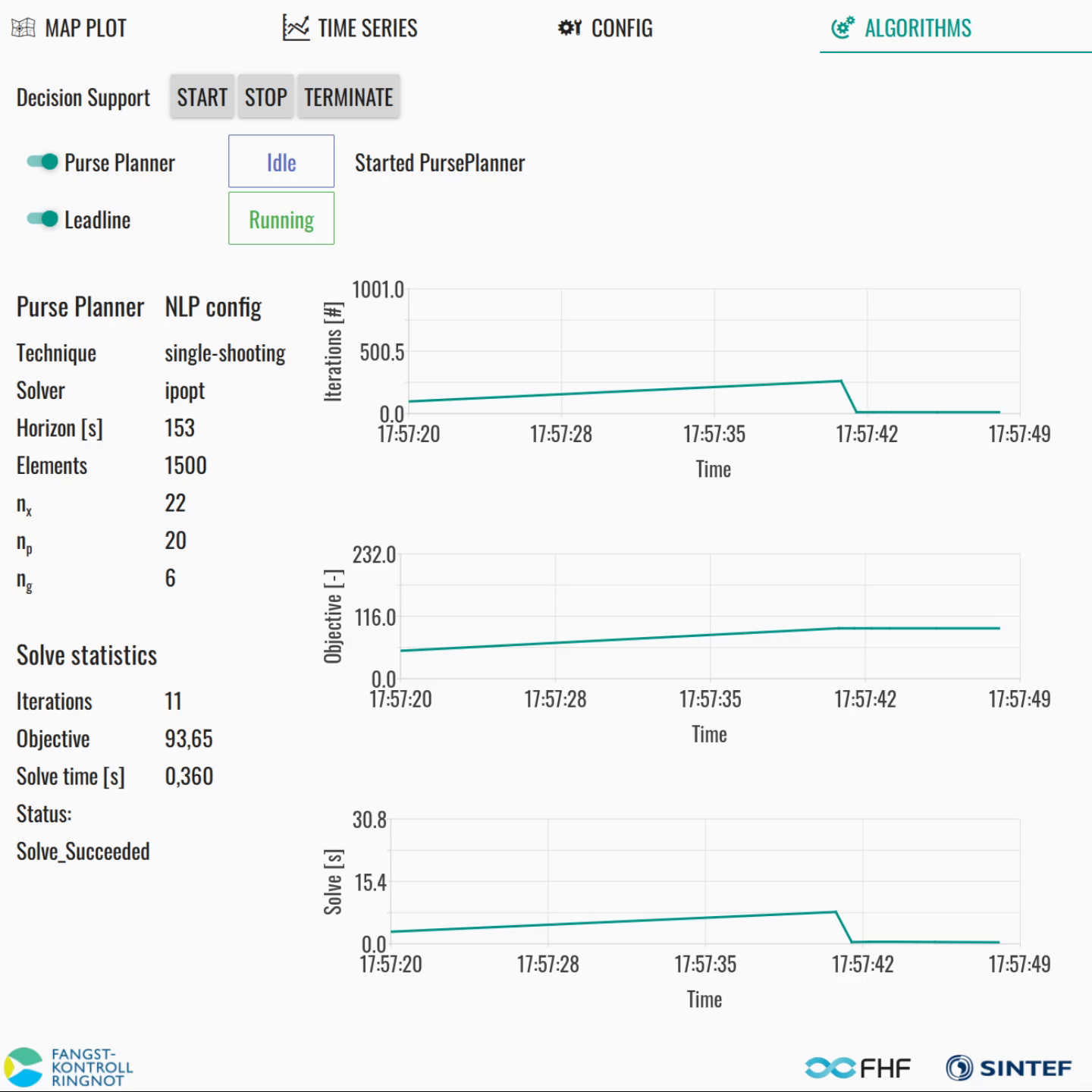
Figure 5 Screenshot of algorithm view.¶
Usage¶
Running the application¶
Once installed, the application should be available as balder on the system path or on the start menu.
Balder has support for English (EN) and Norwegian (NO). By default it should load the
language specified by the operating system, but can be set explicitly by passing EN or
NO to the command line option as follows:
balder --language NO
balder --language EN
Typical usage session¶
A typical user session can consist of the following steps:
Start algorithms; status is indicated as in Figure 6.
If all input signals are available, the algorithm should provide suggested trajectories regularly.
Note that the first iteration may take some extra time (cold start)
User preferences are configured.
Possible settings are as indicated in Figure 7.
The user can change setting speed, ellipse shape, aim point, fish margin, leadline sink margin, and leadline sinking coefficients.
Please refer to Mimir algorithm for details on user preferences
The user navigates to the main dashboard to view suggested setting trajectory, see Figure 8.
The user has the opportunity to override fish movement and depth
The user indicates when he/she wants to keep a suggested trajectory, see Figure 9.
The planning algorithm will keep the displayed trajectory and only update course rate and countdown deployment
When the user rejects the trajectory a new one is provided regularly
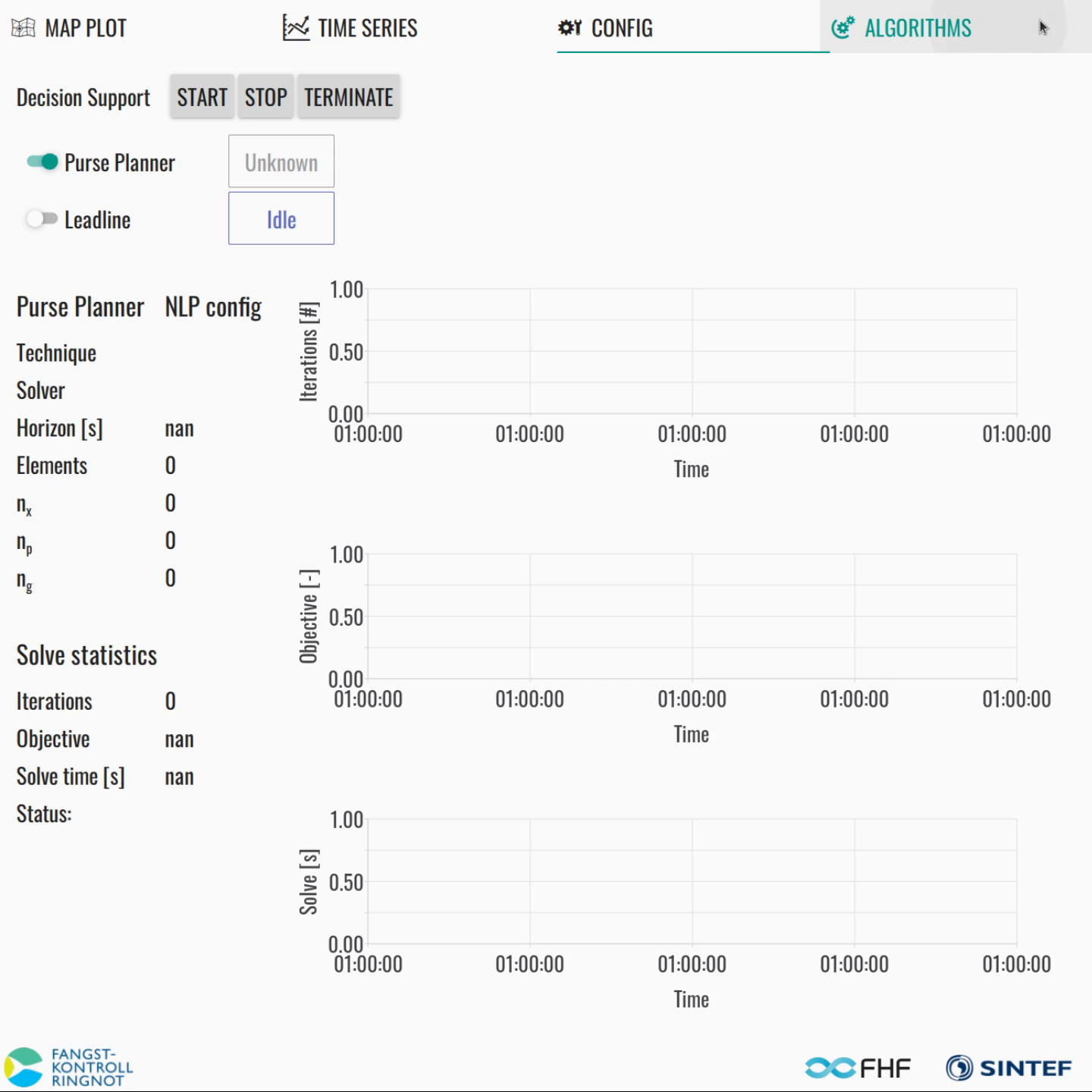
Figure 6 Step 1: Start algorithms.¶
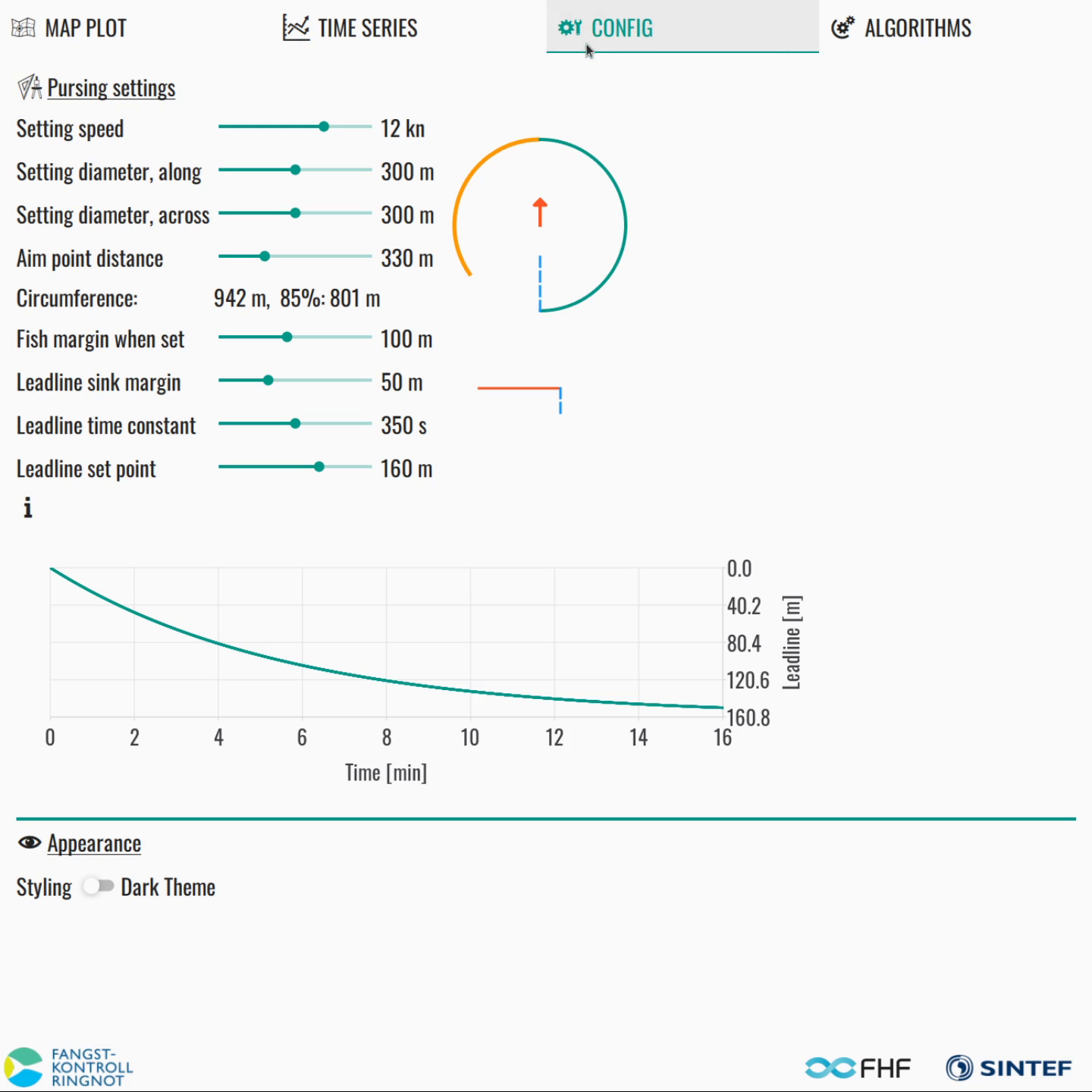
Figure 7 Step 2: Configure preferences.¶
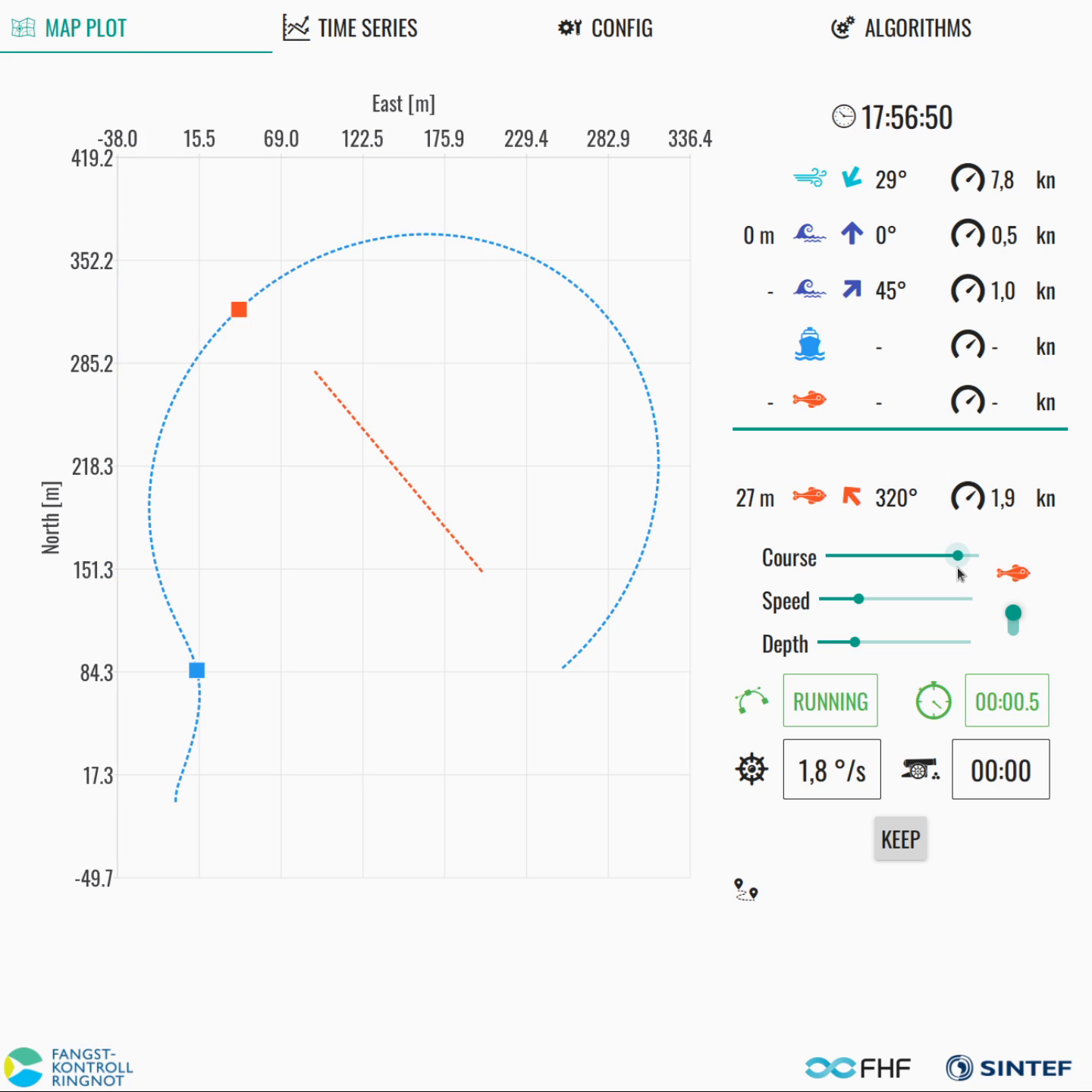
Figure 8 Step 3: Dashboard with suggested setting trajectory.¶
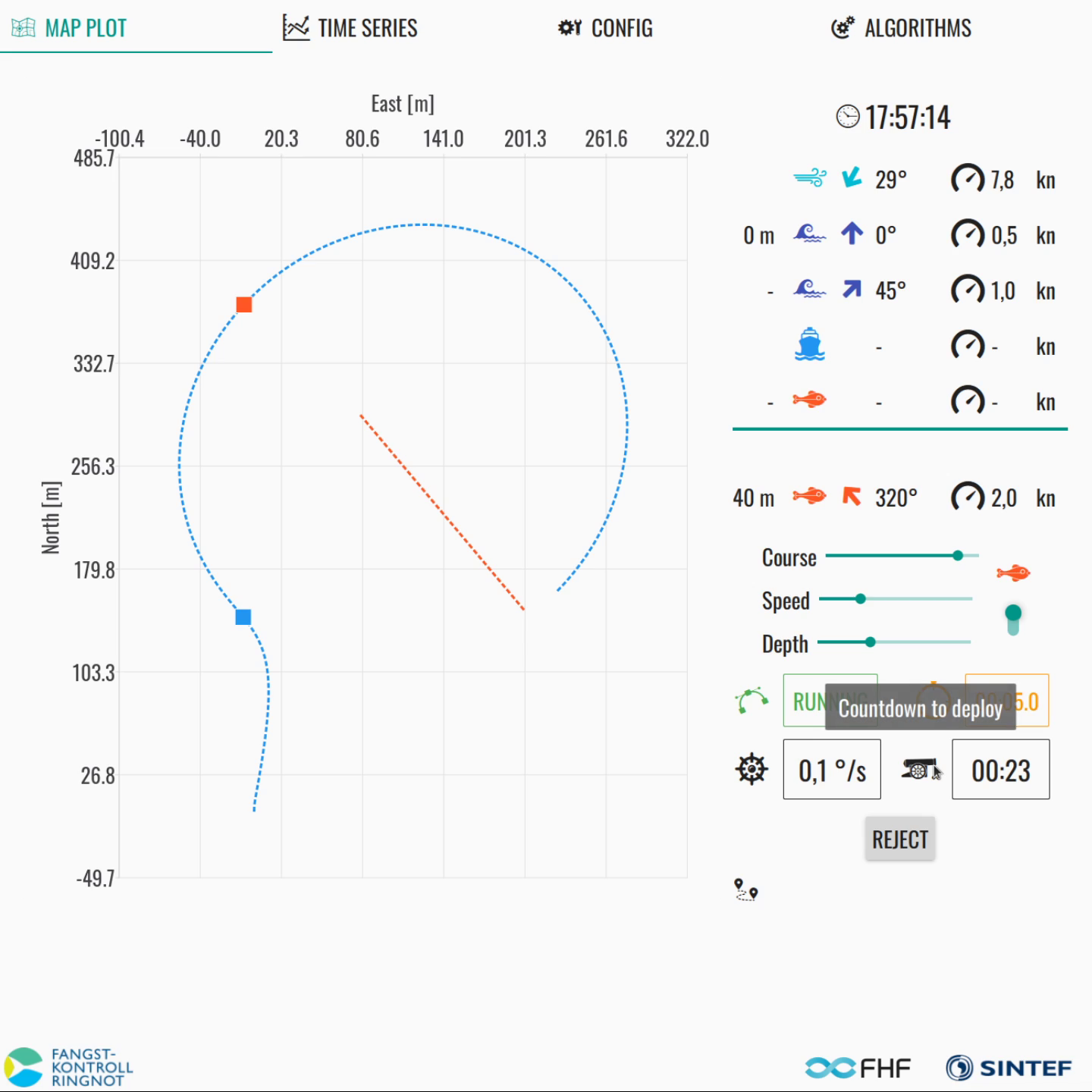
Figure 9 Step 4: Dashboard with kept setting trajectory.¶